| 4.11 |
Equilibrium Applications of Newton's Laws of Motion |
 |
Have you ever been so upset that it took days to recover your “equilibrium?” In this context, the word “equilibrium” refers to a balanced state of mind, one that is not changing wildly. In physics, the word “equilibrium” also refers to a lack of change, but in the sense that the velocity of an object isn't changing. If its velocity doesn't change, an object is not accelerating. Our definition of equilibrium, then, is as follows:
Definition of Equilibrium
| † |
|
In this discussion of equilibrium we ignore rotational motion, which is discussed in Chapters 8 and 9. In Section 9.2 a more complete treatment of the equilibrium of a rigid object is presented and takes into account the concept of torque and the fact that objects can rotate. |
|
An object is in equilibrium when it has zero acceleration.
Newton's laws of motion apply whether or not an object is in equilibrium. For an object in equilibrium the acceleration is zero
in Newton's second law, and the present section presents several examples of this type. In the nonequilibrium case the acceleration of the object is not zero
in the second law, and Section 4.12 deals with these kinds of situations.
Since the acceleration is zero for an object in equilibrium, all of the acceleration components are also zero. In two dimensions, this means that

and

. Substituting these values into the second law (

and

) shows that the
x component and the
y component of the net force must each be zero. In other words, the forces acting on an object in equilibrium must balance. Thus, in two dimensions, the equilibrium condition is expressed by two equations:
In using Equations 4.9a and 4.9b to solve equilibrium problems, we will use the following five-step reasoning strategy:
| Reasoning Strategy |
Analyzing Equilibrium Situations |
|
|
|
1. |
Select the object (often called the “system”) to which Equations 4.9a and 4.9b are to be applied. It may be that two or more objects are connected by means of a rope or a cable. If so, it may be necessary to treat each object separately according to the following steps. |
2. |
Draw a free-body diagram for each object chosen above. Be sure to include only forces that act on the object. Do not include forces that the object exerts on its environment. |
3. |
Choose a set of x, y axes for each object and resolve all forces in the free-body diagram into components that point along these axes. Select the axes so that as many forces as possible point along one or the other of the two axes. Such a choice minimizes the calculations needed to determine the force components. |
4. |
Apply Equations 4.9a and 4.9b by setting the sum of the x components and the sum of the y components of the forces each equal to zero. |
5. |
Solve the two equations obtained in Step 4 for the desired unknown quantities, remembering that two equations can yield answers for only two unknowns at most. |
|
|
|
|
Example 11 illustrates how these steps are followed. It deals with a traction device in which three forces act together to bring about the equilibrium.
| Example |
11 |
 The Physics of Traction for the Foot The Physics of Traction for the Foot |
|
|
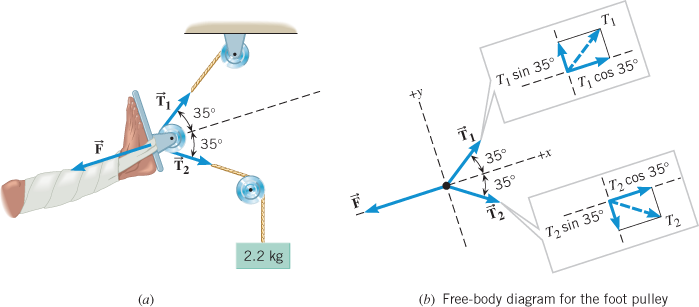
Figure 4.27 a shows a traction device used with a foot injury. The weight of the 2.2-kg object creates a tension in the rope that passes around the pulleys. Therefore, tension forces  and  are applied to the pulley on the foot. (It may seem surprising that the rope applies a force to either side of the foot pulley. A similar effect occurs when you place a finger inside a rubber band and push downward. You can feel each side of the rubber band pulling upward on the finger.) The foot pulley is kept in equilibrium because the foot also applies a force  to it. This force arises in reaction (Newton's third law) to the pulling effect of the forces and . Ignoring the weight of the foot, find the magnitude of .
Reasoning
The forces , , and keep the pulley on the foot at rest. The pulley, therefore, has no acceleration and is in equilibrium. As a result, the sum of the x components and the sum of the y components of the three forces must each be zero. Figure 4.27 b shows the free-body diagram of the pulley on the foot. The x axis is chosen to be along the direction of force , and the components of the forces and are indicated in the drawing. (See Section 1.7 for a review of vector components.)
|
Choose the orientation of the x, y axes for convenience. In Example 11, the axes have been rotated so the force points along the x axis. Since does not have a component along the y axis, the analysis is simplified. |
|
|
|
|
Solution
Since the sum of the y components of the forces is zero, it follows that
or  . In other words, the magnitudes of the tension forces are equal. In addition, the sum of the x components of the forces is zero, so we have that
Solving for F and letting  , we find that  . However, the tension T in the rope is determined by the weight of the 2.2-kg object:  , where m is its mass and g is the acceleration due to gravity. Therefore, the magnitude of  is
|
|
|
|
Example 12 presents another situation in which three forces are responsible for the equilibrium of an object. However, in this example all the forces have different magnitudes.
| Example |
12 |
Replacing an Engine |
|
|
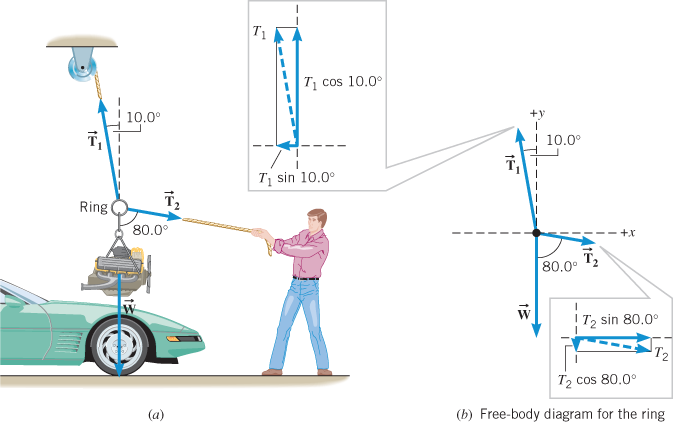
An automobile engine has a weight  , whose magnitude is  . This engine is being positioned above an engine compartment, as Figure 4.28 a illustrates. To position the engine, a worker is using a rope. Find the tension in the supporting cable and the tension in the positioning rope.
Reasoning
Under the influence of the forces , , and the ring in Figure 4.28 a is at rest and, therefore, in equilibrium. Consequently, the sum of the x components and the sum of the y components of these forces must each be zero;  and  . By using these relations, we can find  and . Figure 4.28 b shows the free-body diagram of the ring and the force components for a suitable x, y axis system.
|
When an object is in equilibrium, as here in Example 12, the net force is zero,  . This does not mean that each individual force is zero. It means that the vector sum of all the forces is zero. |
|
|
|
|
Solution
The free-body diagram shows the components for each of the three forces, and the components are listed in the following table:
Force |
x Component |
y Component |
|
|
|
|
|
|
|
0 |
|
|
|
The plus signs in the table denote components that point along the positive axes, and the minus signs denote components that point along the negative axes. Setting the sum of the x components and the sum of the y components equal to zero leads to the following equations:
Solving the first of these equations for shows that
Substituting this expression for into the second equation gives
Setting in this result yields  . Since  and  , it follows that  .
|
|
|
|
An object can be moving and still be in equilibrium, provided there is no acceleration. Example 13 illustrates such a case, and the solution is again obtained using the five-step reasoning strategy summarized at the beginning of the section.
| Example |
13 |
Equilibrium at Constant Velocity |
|
|
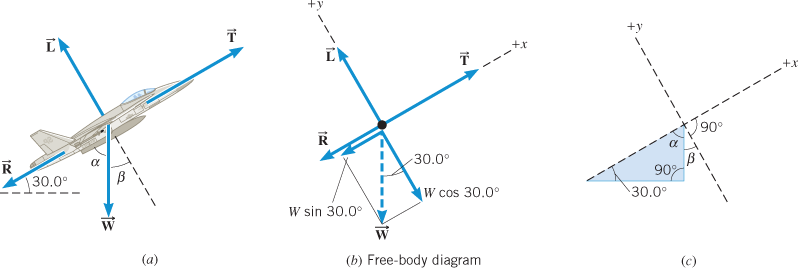
A jet plane is flying with a constant speed along a straight line, at an angle of  above the horizontal, as Figure 4.29 a indicates. The plane has a weight whose magnitude is  , and its engines provide a forward thrust  of magnitude  . In addition, the lift force  (directed perpendicular to the wings) and the force  of air resistance (directed opposite to the motion) act on the plane. Find and .
Reasoning
Figure 4.29 b shows the free-body diagram of the plane, including the forces , , , and . Since the plane is flying with a constant speed along a straight line, it is not accelerating, it is in equilibrium, and the sum of the x components and the sum of the y components of these forces must be zero. The weight and the thrust are known, so the lift force and the force of air resistance can be obtained from these equilibrium conditions. To calculate the components, we have chosen axes in the free-body diagram that are rotated by from their usual horizontal–vertical positions. This has been done purely for convenience, since the weight is then the only force that does not lie along either axis.
|
A moving object is in equilibrium if it moves with a constant velocity; then its acceleration is zero. A zero acceleration is the fundamental characteristic of an object in equilibrium. |
|
|
|
|
Solution
When determining the components of the weight, it is necessary to realize that the angle  in Figure 4.29 a is . Part c of the drawing focuses attention on the geometry that is responsible for this fact. There it can be seen that  and  , with the result that  . The following table lists the components of the forces acting on the jet.
Force |
x Component |
y Component |
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
Setting the sum of the x component of the forces to zero gives
Setting the sum of the y component of the forces to zero gives
|
|
|
|
| 19. |
In which one of the following situations could an object possibly be in equilibrium?
Three forces act on the object; the forces all point along the same line but may have different directions. Two perpendicular forces act on the object. A single force acts on the object. In none of the situations described in (a), (b), and (c) could the object possibly be in equilibrium.
Answer:
| a. |
Three forces act on the object; the forces all point along the same line but may have different directions. |
|
| 20. |
A stone is thrown from the top of a cliff. Air resistance is negligible. As the stone falls, is it
in equilibrium or not in equilibrium?
Answer:
|
| 21. |
During the final stages of descent, a sky diver with an open parachute approaches the ground with a constant velocity. There is no wind to blow him from side to side. Which one of the following statements is true?
The sky diver is not in equilibrium. The force of gravity is the only force acting on the sky diver, so that he is in equilibrium. The sky diver is in equilibrium because no forces are acting on him. The sky diver is in equilibrium because two forces act on him, the downward-acting force of gravity and the upward-acting force of the parachute.
Answer:
| d. |
The sky diver is in equilibrium because two forces act on him, the downward-acting force of gravity and the upward-acting force of the parachute. |
|
| 22. |
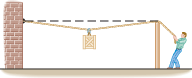
A crate hangs from a ring at the middle of a rope, as the drawing illustrates. A person is pulling on the right end of the rope to keep the crate in equilibrium. Can the rope ever be made to be perfectly horizontal?
Answer:
No, because there must always be a vertical (upward) component of the tension force in the rope to balance the weight of the crate. |
|
|
|